想象一下,一辆装备了先进智能系统的越野车。它不仅能自动行驶,还能实时感知脚下路面的状况——是颠簸的沙地、湿滑的泥泞,还是坚硬的岩石?然后,它会根据路况自动调整悬挂系统、轮胎抓地力和动力输出,确保安全高效地前进。这听起来像科幻?其实,我们身体里微小的细胞,就拥有类似甚至更精妙的“智能驾驶”系统!它们能敏锐地“感知”周围环境的“路况”(是软如果冻还是硬如岩石),并据此调整自己的“行驶”方式(比如移动、生长或分化)。
核心问题:细胞这辆“越野车”的“路况传感器”和“智能悬挂”是如何工作的?
深圳湾实验室的Artem Efremov研究员团队近期在《自然·物理》上发表的研究,就像破解了细胞“越野车”的一个核心秘密。他们发现,细胞内部有一套精密的“路况感应与响应系统”,其关键在于几个核心“零件”的“弹性”特性。
01 关键发现:“悬挂系统”的弹性决定“驾驶模式”
“路况传感器”与“悬挂连接件”: 细胞表面有像“传感器”一样的分子(机械转导蛋白),它们负责“触摸”环境,感知是“软路”还是“硬路”。这些“传感器”通过一些关键的“连接件”(力传递连接蛋白)连接到细胞内部的“动力底盘”(细胞骨架)。
“悬挂弹性”是核心开关: Efremov团队最重要的发现是,这些“连接件”本身的“弹性”——你可以想象成它们是像橡皮筋一样容易拉伸,还是像钢缆一样难以变形——是决定细胞如何响应“路况”的核心开关。
“软悬挂”模式(连接件弹性高): 当环境是“软路”(如柔软的凝胶)时,这些“连接件”就像柔软的悬挂。细胞施加的力很容易让它们变形,就像越野车在沙地上,悬挂系统会大幅压缩吸收震动。这种“软”的连接方式,使得细胞内部的“动力底盘”接收到的“路面信号”比较弱,细胞倾向于采取一种“省力”或“探索”的“驾驶模式”(比如缓慢移动或保持稳定)。
“硬悬挂”模式(连接件弹性低): 当环境是“硬路”(如坚硬的培养皿或组织)时,这些“连接件”就像刚硬的悬挂。细胞施加的力很难让它们变形,就像越野车在岩石上,悬挂系统几乎不压缩,力直接传递到底盘。这种“硬”的连接方式,使得细胞内部的“动力底盘”接收到强烈的“路面信号”,细胞会立刻切换到“抓地力强”或“发力”的“驾驶模式”(比如快速移动、收缩发力或形成稳固的抓握点)。
“智能计算器”预测驾驶行为: 研究团队还开发了一个精妙的“车辆动力学计算模型”。这个模型就像给细胞“越野车”装了一个模拟器,输入“连接件”的弹性参数和“路况”硬度,就能准确预测出细胞会采取哪种“驾驶模式”(即蛋白质的响应状态)。这强有力地证明了“连接件弹性”确实是那个决定性的“智能开关”。
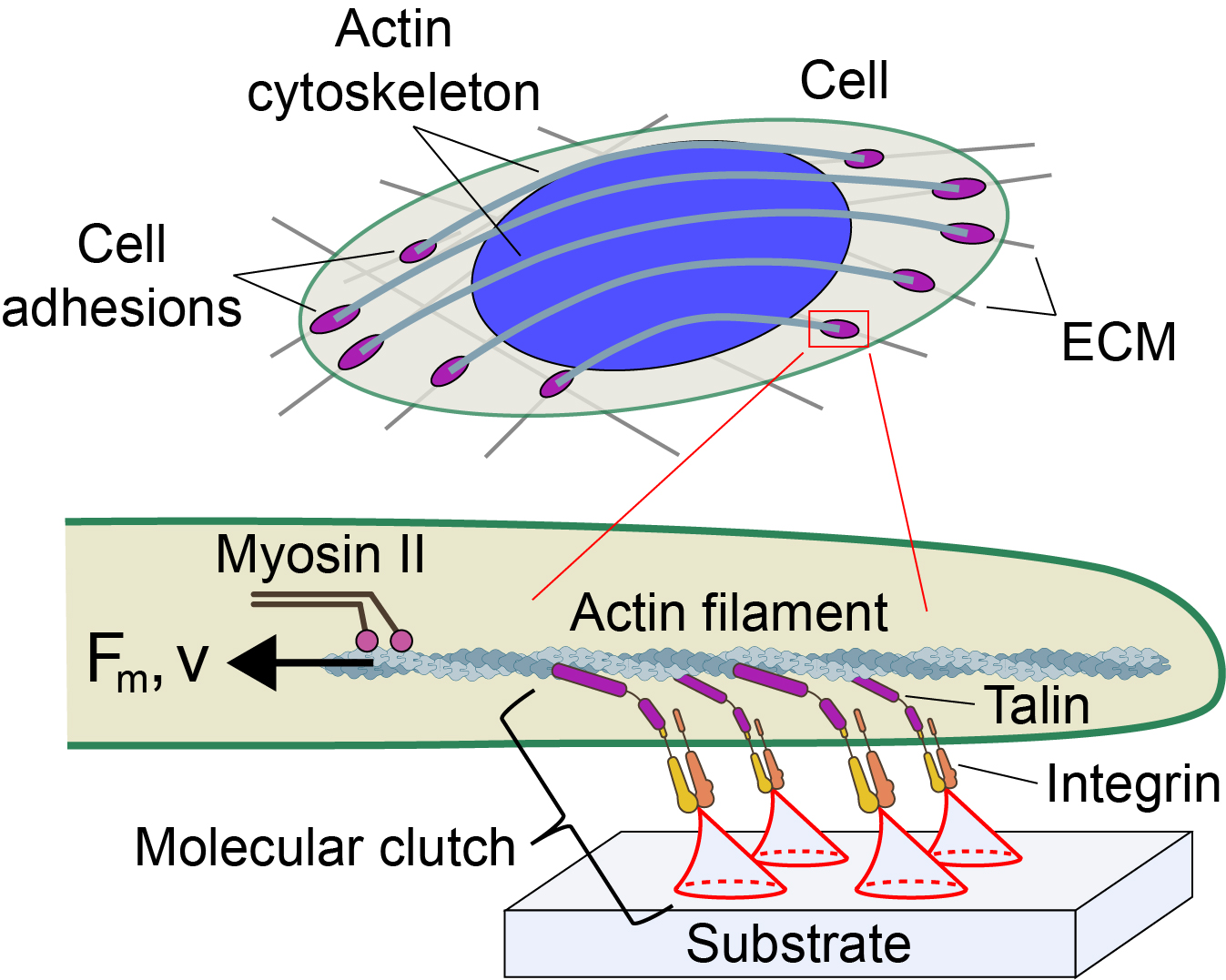
Efremov团队构建的半解析模型整合了主要细胞粘附蛋白的力响应数据,能够精准预测连接肌动蛋白细胞骨架与粘附受体(即“分子离合器”,如图)的力加载速率。
为什么这个发现如此重要?——当“智能驾驶”失灵时,细胞这套“智能越野车”系统至关重要。如果“路况传感器”或“悬挂弹性开关”出了问题,细胞就会“迷路”或“失控”。
癌症转移的“疯狂越野”: 最典型的例子就是癌细胞转移。癌细胞就像一辆失控的越野车,它利用这套系统感知身体不同部位(软的器官、硬的骨骼)的“路况”,然后调整自己的“驾驶模式”以适应环境,最终“开”到不该去的地方“安营扎寨”(形成转移灶)。理解这个“弹性开关”的原理,未来就有可能设计出“干扰器”,让癌细胞的“智能驾驶”失灵,阻止它们“疯狂越野”。
伤口愈合与组织发育:在伤口愈合或胚胎发育过程中,细胞也需要精确感知环境的“路况”变化,才能正确地移动、聚集并构建组织。这套系统的正常运作是生命活动的基础。
02 未来之路:升级“车辆模拟器”
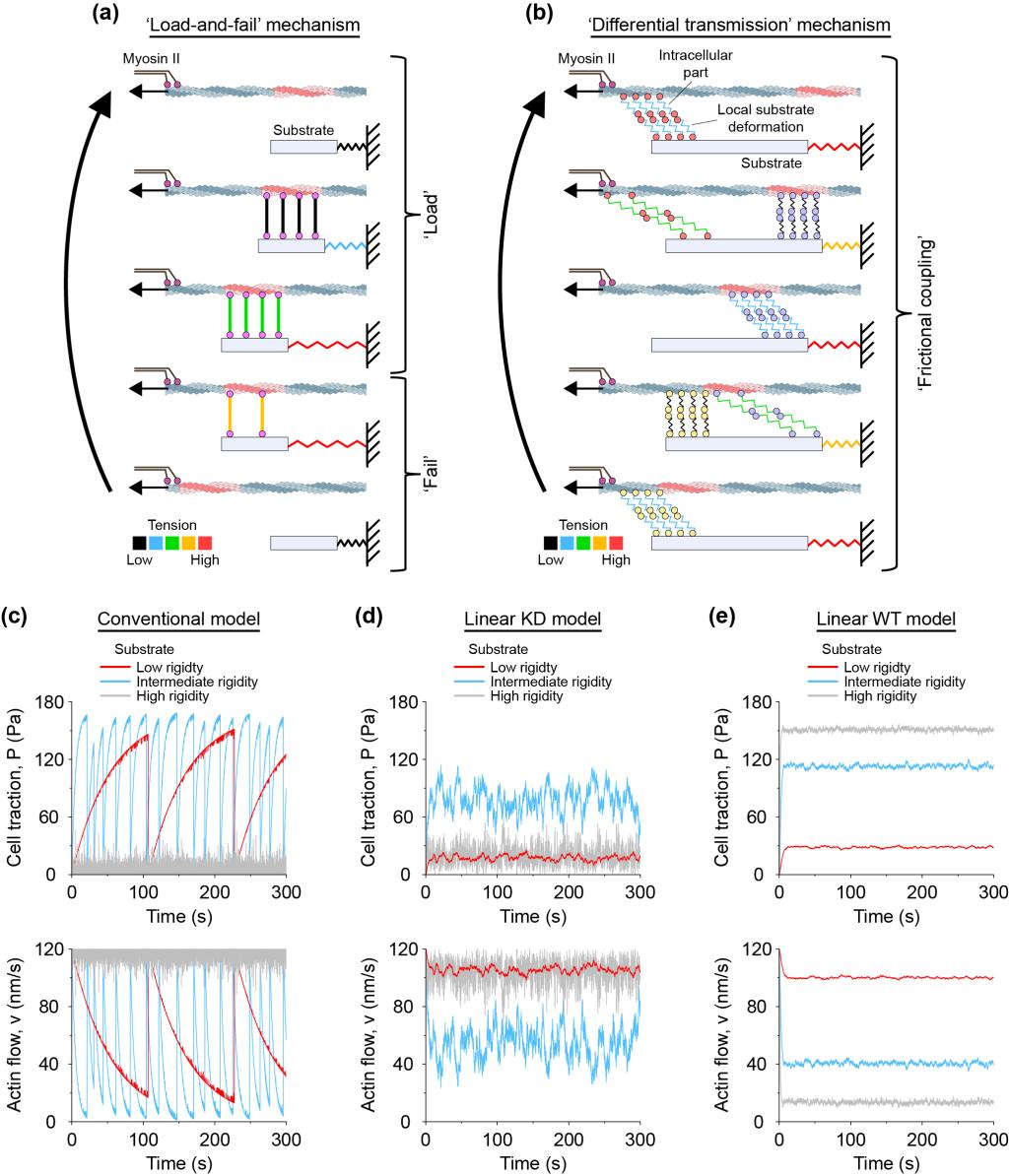
Efremov团队借助该模型证明,主要分子离合组件(如 Talin蛋白)的弹性行为对于细胞粘附复合物的机械响应以及基底与细胞骨架之间的力传递至关重要。正如模型所预测的,这些组件的高弹性使得基底和肌动蛋白丝能够独立移动,同时通过分子离合器介导的差速传递机制,在二者之间维持稳定的机械耦合。这一结果与实验观测结果高度吻合(如图)。
Efremov团队的这项发现,只是绘制了细胞“智能越野车”核心控制系统的第一张蓝图。他们计划不断升级这个“车辆动力学计算模型”,加入更多复杂的“零件”和“路况”因素:
“粘合剂”的相变: 细胞在“硬路”上需要“抓地”时,会形成像“粘合剂”一样的结构(粘附斑)。这些“粘合剂”的形成过程涉及一种类似“水珠聚集”的现象(相分离)。这个过程如何影响“悬挂”的响应?需要加入模型。
“底盘”的动态调整: 细胞的“动力底盘”(细胞骨架)在受力后会像可变形框架一样重组。这种“底盘”的动态变化如何与“悬挂弹性”互动,共同决定“驾驶模式”?也需要整合进去。
最终目标是构建一个最完整的“细胞智能越野车驾驶手册”,彻底搞清细胞如何通过感知“路况”来精确控制自己的“行驶”行为,尤其是在细胞迁移这种关键的“长途越野”过程中。
延伸阅读 Artem Efremov课题组揭示细胞粘附多稳态机械敏感分子机制

Artem Efremov
Artem Efremov研究团队长期致力于单分子生物物理学与细胞力学生物学研究,运用单分子操纵技术(如光镊/磁镊),开发建构理论模型,围绕细胞骨架力学调控、染色体动态结构及机械信号转导机制等方向展开工作,主要研究成果有: 1.开发了一种转移矩阵计算方法,用于分析张力和扭矩约束对DNA-蛋白质相互作用的影响;2.揭示了Myosin IIA蛋白与Formin蛋白协同调控丝状伪足机械敏感性的核心机制;3.阐明了L型钙离子通道在丝状伪足机械感知中的关键作用;4.构建了一个通用理论框架,用于描述活细胞核中染色体DNA的包装机制。同时还突破性地预测了细胞核尺寸对染色质结构和组织的影响。团队目前正开展三项创新性跨学科研究:1.通过实验与计算相结合的方法,研究调控活细胞核大小的分子机制,及其对活细胞染色质组织的潜在影响。2.细胞迁移信号通路分子机制研究。3.细胞粘附的分子机制研究。更多信息请访问课题组网站:https://artemefremovlab.com/
文章来源|Artem课题组 Deepseek
欢迎投稿、建议|media@szbl.ac.cn



 粤公网安备44031102000926号
粤公网安备44031102000926号